Подъемноопускные устройства затворов. Служебные мосты
Различают затворы: 1) гидравлического действия, приводимые в движение давлением воды, поступающей из верхнего бьефа в особые камеры и 2) механического действия, которые поднимаются и опускаются с помощью тех или других механических устройств.
Затворы механического действия могут обслуживаться механизмами: а) стационарными (индивидуальными); б) подвижными; в последнем случае каждый отдельный подвижный механизм (в виде, например, портального крана, перемещающегося по рельсам) обслуживает несколько затворов. Стационарные механизмы имеют ряд преимуществ: 1) они позволяют быстро открывать отверстия, что важно, например, в случае быстронарастающих паводков; 2) при наличии этих механизмов относительно легко осуществлять дистанционное управление затворами; 3) в случае затворов, требующих принудительную посадку, стационарные механизмы позволяют относительно просто осуществлять ее; 4) эти механизмы облегчают маневрирование затворами, что важно в случае размываемого (нескального) основания плотины.
Однако при большом числе отверстий (более 7... 10) стационарные механизмы обычно оказываются дороже, чем подвижные. Кроме того, подвижные механизмы позволяют: 1) переставлять плоские затворы из одного пролета в другой; 2) транспортировать вдоль плотины аварийноремонтные затворы; 3) подъемные краны могут быть использованы на ГЭС, а такжев период строительства плотины.
Затворы, обслуживаемые как стационарными, так и подвижными Механизмами, приводятся в движение посредством так называемых тяг.
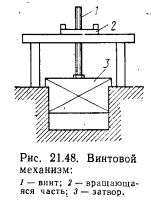
1. Виды тяг. Гибкие тяги выполняют в виде обычных цепей (в случае малых затворов) или чаще всего в виде стальных тросов или цепей Галля (пластинчатых цепей). Присоединение гибкой тяги к затвору осуществляют, как показано на рис. 21.47; с помощью гибкой тяги нельзя осуществлять принудительную посадку затвора. Жесткие тяги выполняют в виде: а) штанг (штоков) с пинтовой нарезкой (в случае малых затворов); б) штанг без нарезки; в) прямых цевочных (пальчатых) реек (в случае малых затворов); г) дугообразных пальчатых реек (в случае сегментных затворов; см. рис. 21.31).2. Стационарные подъемноопускные механизмы. В качестве стационарных подъемноопускных механизмов применяют: а) винтовые механизмы (рис. 21.48) и им подобные для малых затворов; б) лебедки, имеющие соответствующий барабан или грузовую звездочку (в случае цепи Галля); лебедки могут приводиться в движение либо электродвигателем, либо вручную; в) гидравлические домкраты (гидроподъемники).
Лебедки t приводимые в действие электродвигателями. В случаеобычяых плоских затворов различают четыре схемы расположения лебедок и электродвигателей (рис. 21.49).
Схема 1. Электродвигатель 8 расположен на служебном мосту 5 посередине пролета, причем он приводит во вращение стальной вал 7, который в свою очередь приводит в действие лебедки с грузовыми звездочками (или барабанами) 2. Гибкие тяги 6, сходящие со звездочек (или барабанов), находятся в пазах 1 (см. 1—7); снизу эти тяги присоединяются к затвору (см. рис. 21.47).
Схема 2. В этом случае, электродвигатель 8 располагается на одном быке, стальной вал здесь переброшен через пролет; служебный мост может быть узким или вовсе отсутствовать.
Схема 3. Эта схема отличается от предыдущей тем, что стальной вал 7 (переброшенный через пролет) приводится во вращение двумя электродвигателями, расположенными на соседних быках. Поскольку обе лебедки приводятся в движение одним и тем же валом, то перекоса затвора, поднимаемого двумя тягами, быть не может.
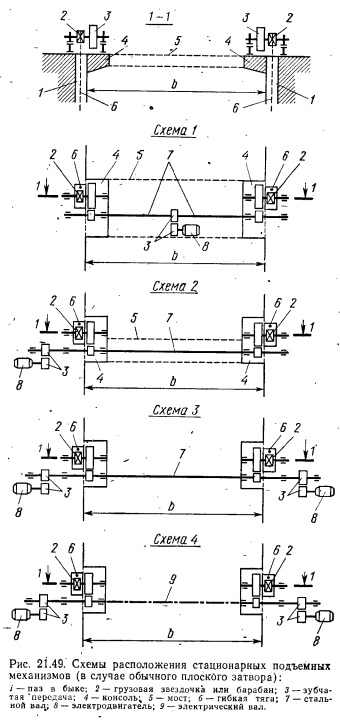
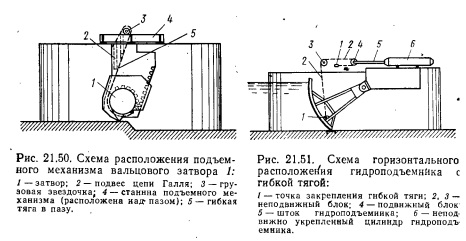
Схема 4. Имеется два отдельных подъемных механизма с двумя разными электродвигателями. Чтобы добиться необходимой синхронной работы обоих подъемных механизмов, создают особое электрическое устройство 9.
Каждая из описанных схем имеет свою область применения. Например, схема 1 может применяться, когда мы имеем достаточно широкий служебный мост. Схемы 3 и 4 используют, когда требуется большая мощность подъемных механизмов.
Зубчатые (или червячные) передачи механизмов рассчитывают на подъемное усилие Sf, учитывая требуемые скорости поднятия и опускания затвора. Обычно скорость поднятия плоского затвора, приводимого в движение электродвигателем, не превышает 2 м/мин. Мощность двигателя, рассчитываемая с учетом установленного подъемного усилия Sf, редко превышает 100 кВт.
Для приближенного определения собственного веса подъемных механизмов имеются эмпирические формулы, согласно которым вес механизма зависит: а) от подъемного усилия Sf; б) скорости движения затвора при его подъеме; в) типа затвора. Наименьший вес механизмов получается в случае сегментного и вальцового затворов. Вес подъемных механизмов сдвоенных затворов и с клапаном оказывается примерно на 15...20 % больше, чем вес подъемных механизмов обычных затворов.
Помимо электрического привода при затворах предусматривают дополнительный ручной привод, который позволяет открыть отверстие (с относительно малой скоростью), когда по какимлибо причинам подача электроэнергии прекратилась. После полного открытия затвора в большинстве случаев его подвешивают на особые крюки.
Подъемные механизмы или закрывают соответствующими стальными колпаками, или помещают в специальные будки. При подъеме затвора, подвешенного на гибких тягах, возникает вопрос об уборке свободных концов этих тяг. Тросы навиваются нарабочий барабан. Что касается цепей Галля, то здесь обычно создают особые устройства для отвода от грузовой звездочки освободившегося конца цепи и подвешивания ее в специальном «магазине». Двусторонний подъем обычных сегментных затворов осуществляется стационарными подъемными механизмами (см. рис. 21.28... 21.31). Односторонний подъем и опускание вальцовых затворов стационарными механизмами показаны на рис. 21.50.
Гидравлические домкраты (гидроподъемники). Основными элементами гидроподъемника являются: а) цилиндр с поршнем, имеющим шток; б) специальный насос, который подает масло в цилиндр. Насос приводится в действие электродвигателем. В состав гидроподъемника могут входить два или несколько рабочих цилиндров (с поршнями и штоками), которые соединены маслопро иодами с одним насосом.
Существуют так называемые телескопические гидроподъемники, обеспечивающие подъем затвора на большую высоту (до 19 м). Эти подъемники образуются, например, двумя цилиндрами: наружным и внутренним; длина каждого цилиндра доходит до 10 м. Диаметр наружного цилиндра доходит, например, до 0,5 м. Грузоподъемность одного цилиндра с поршнем может достигать 600 т. С помощью гидроподъемника легко можно осуществлять быстрое опускание затвора (путем выпуска масла из цилиндра).
Возможны следующие варианты установки гидроподъемника:
а) цилиндр установлен неподвижно; поршень прикреплен к затвору, причем, двигаясь, он поднимает затвор; б) гидроподъемник шарнирно прикреплен к затвору и к своей опоре (см. рис. 21.35);в) цилиндр гидроподъемника укреплен неподвижно; усилие от штока передается затвору с помощью гибкой тяги (рис. 21.51).
Гидроподъемники широко применяют в связи со следующими положительными их качествами: а) при малых размерах, являясь весьма компактными, они развивают большую мощность; б) управление ими весьма простое; в) гидроподъемниках отсутствуют зубчатые (или червячные) передачи, требующие специального ухода;
г) они обеспечивают плавное движение затвора.Основной недостаток гидроподъемника заключается в возможности утечки рабочей жидкости из его цилиндра. .
Управление стационарными подъемными механизмами; а) местное управление, расположенное непосредственно у электродвигателя; б) дистанционное управление — с помощью подачи соответствующих сигналов по электрической сети с известного расстояния. Если такое расстояние велико (более 1 км), то переходят к дистанционному управлению с использованием средств телемеханики. Следует еще различать автоматическое регулирование, с помощью которого автоматически поддерживаются или устанавливаются либо заданные параметры движения, либо открытия затворов. Используя средства дистанционного и автоматического управления затворами, мы удешевляем эксплуатацию затворов, а также делаем их работу более надежной.
3. Подвижные подъемные механизмы. В случае малых затворов для их подъема применяют часто лебедки, перемещаемые от одного пролета к другому, а такжетельферы. При наличии достаточно больших затворов (плоских, иногда сегментных) для маневрирования ими используют подъемные краны, движущиеся по рельсовым путям; на кранах устанавливают лебедки, кбторые могут перемещаться обычно в пределах пролетного строения крана.
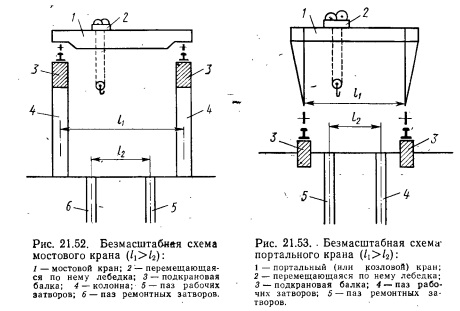
Различают следующие виды кранов: мостовые, портальные, полупортальные и козловые. К кранам предъявляют следующие требования: а) высотное положение пролетного строения крана должно позволять полностью открывать отверстие и вынимать плоский затвор из пазов; б) данный кран за счет горизонтального перемещения по нему лебедки и иногда за счет устройства специальных консолей должен обслуживатьсоответствующие линии рабочих и ремонтноаварийных затворов.
Мостовые краны (рис. 21.52) на плотинах устраивают редко. Хотя эти краны и дешевле портальных (рис. 21.53), но они требуют сооружения колонн. Пролеты и грузоподъемность кранов установлены нормами. Портальные краны грузоподъемностью более 100 т кроме главного подъемного крюка имеют вспомогательный подъемный кркж. Скорость перемещения кранов изменяется от 0,5 до 3,0 см/с. Чтобы снизить высотное положение пролетного строения крана (высоту портального крана), иногда ремонтноаварий. ные затворы расчленяют на секции по их высоте. Дистанционное управление кранами затруднительно.
Площадку гребня земляной плотины, примыкающую к устою бетонной водосливной плотины, часто используют для монтажа затворов, склада ремюнтных заграждений и т. д., поэтому подъемный кран должен иметь возможность выезжать на такую площадку. С учетом этих соображений следует назначать размеры площадки.
Используя подвижные подъемные механизмы, мы должны иметь .возможность закрепить затвор в соответствующем промежуточном положении после того, как подъемный кран поднимет его на определенную высоту. Для закрепления затвора в промежуточном его положении применяют так называемые подхваты, имеющие.самую различную конструкцию. Их располагают по высоте . пазов (через 0,5 м), с тем чтобы можно было фиксировать открытие отверстия.
4. Служебные мосты. На плотине помимо транзитных (шоссейных и железнодорожных) устраивают служебные мосты: 1) для размещения на них стационарных подъемных механизмов; 2) для служебного сообщения; 3) для перемещения по ним подвижных подъемных механизмов, обслуживающих либо только ремонтноаварийные линии затворов, либо как ремонтноаварийные линии затворов, так и линию рабочих затворов. Пролеты служебных мостов соответствуют ширине отверстий плотины, перекрываемых затворами.
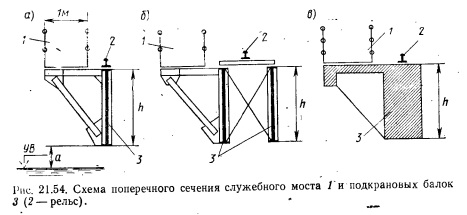
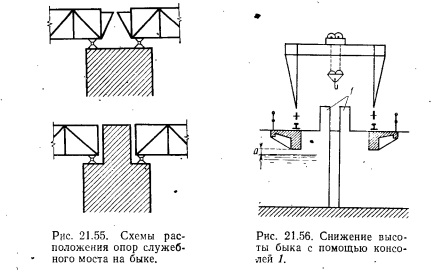
При использовании портальных кранов по служебным мостам иролагают соответствующие рельсы, располагаемые на подкрановых балках. Металлические подкрановые балки назначают обычно высотой (1/8...1/1)/; эти балки выполняют сплошными или в виде сквозных ферм; устраивают также железобетонные подкрановые балки.высотой h (рис. 21.54). Низ подкрановых балок должен быть намечен.на таком уровне а (рис. 21.54, о), чтобы под подкрановыми балками свободно могли проходить различные плавающие тела. В некоторых случаях на плотине приходится устраивать два или три служебных моста. На рис. 21.54, а, б показаны схемы поперечного сечения служебного моста металлического и на рис. 21.54, в — железобетонного. На рис. 21.55 приведено два возможных варианта расположения на быке опор пролетного стро сния моста.
Проектируя в теле устоя плотины, расположенного на нескаль иом основании, вертикальные сквозные деформационные швы, не следует намечать их между двумя подкрановыми балками, по которым перемещается портальный кран.
Чтобы уменьшить высоту быков, иногда снижают отметку подкрановых путей (рис. 21.56), предусматривая при этом устройство вертикальных железобетонных консолей 1. Высоту этих конселей назначают с таким расчетом, чтобы при полном открытии отверстия верхнее колесо плоского затвора не поднялось выше верха консоли (не вышло из паза).